Balancing Robot Firmware
May 20, 2014
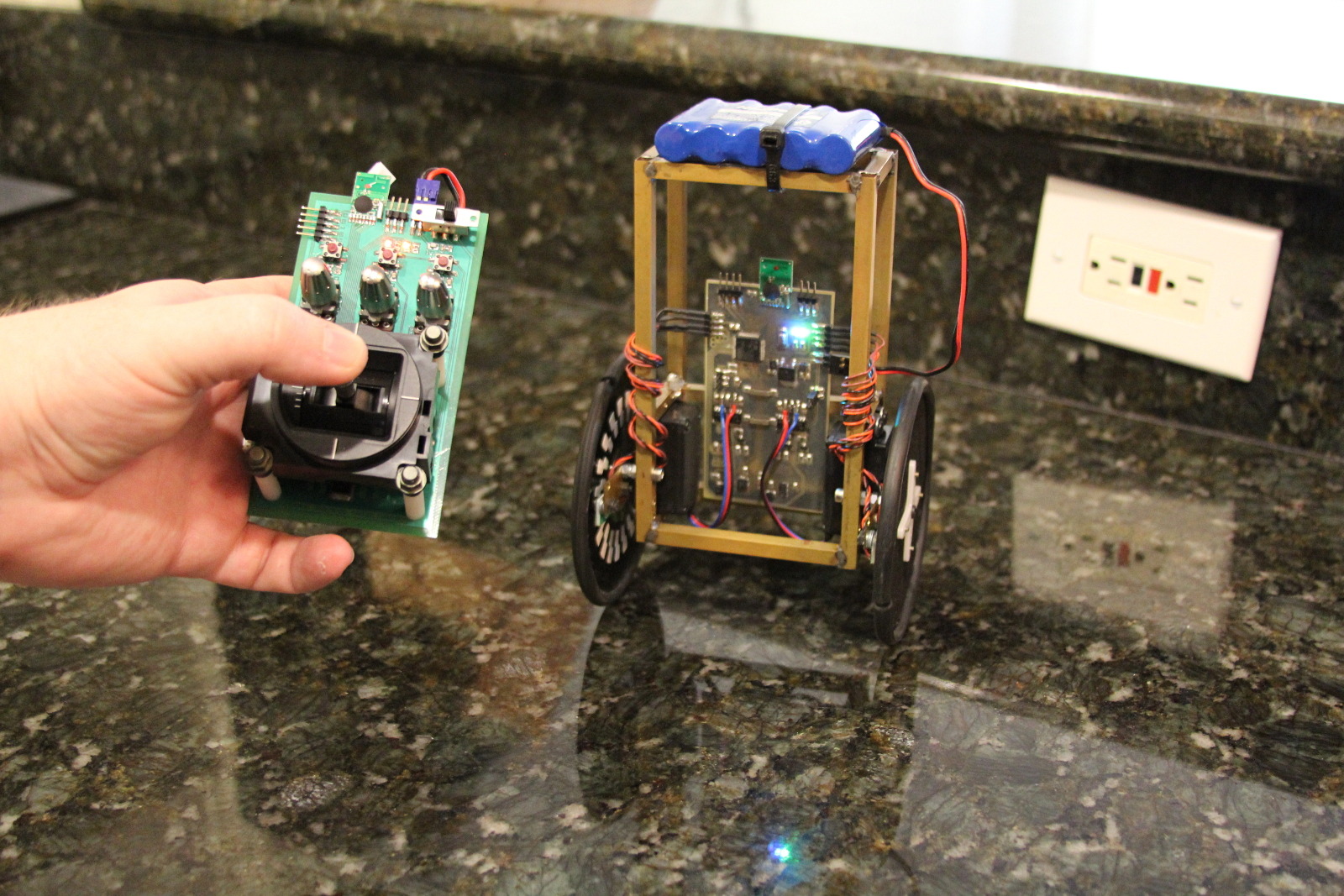
I'm releasing the firmware for my balancing robot into the public domain. Use it however you wish. The code is rather specific to my choice in microcontroller and sensors, but it might still be helpful to those working on their own robots.
Most of the work takes place in two files: main.c and isrs.c.
The main() function does all of the initialization work, then enters an infinite loop that constantly streams telemetry data out via RS232.
The interrupt service routines in isrs.c are where all of the “real work” is done. That's where the new values from all sensors are read, steering and throttle commands are received from the CC2500-based 2.4GHz transmitter, and the motor PWM values are adjusted based on a PID control loop.
I have amassed a small collection of reusable code while working on various projects with the STM32F0 microcontroller. This collection of code is not polished enough for sharing, but since it was used in this project I am including it anyway. It's in the /f0lib/ directory and should be used with caution. Be sure to read the function implementations before reusing the code in your own projects. The code in /f0lib/ was only written with my particular use cases in mind.
The firmware can be downloaded as a zip file, or accessed through my Balancing Robot repository on GitHub. Have fun!
Video clips and more photos are in my previous post from May 18th.