RS232 Telemetry Viewer
May 31, 2014
While developing my balancing robot I needed to visualize certain variables. Being able to monitor angles, velocities and feedback loop factors made it easier to tune the control loop and verify the correct functioning of my sensors. I wrote the program in Java, utilizing the Swing and RXTX libraries.
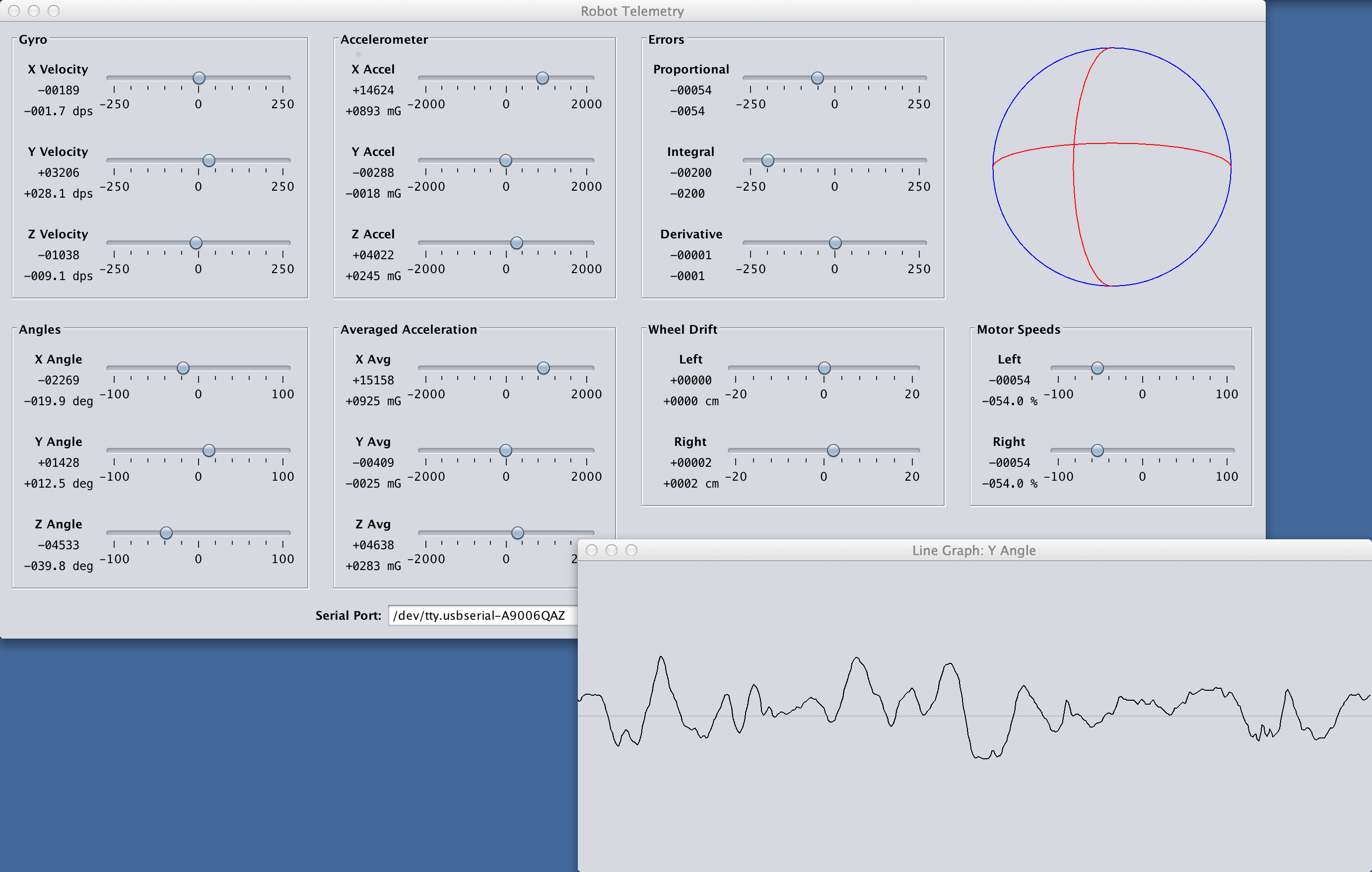
Current values for each data point are shown with the sliders and text labels. Clicking on a data point will bring up a new window that shows the history of that data point in the form of a line graph. Multiple line graph windows can be used to track the history of several items at once.
The source code can be downloaded as a zip file, or accessed through my RS232 Telemetry Viewer repository on GitHub. To run the code you will need to install the RXTX library.
The code is split into eight classes: Main, Database, TelemetryGUI, ConfigurationLoader, SerialConfigPanel, SerialPortListener, BallPanel and LineGraph. The TelemetryGUI class has two inner classes: TelemetryGroup and TelemetryItem.
Main simply creates an instance of the Database and TelemetryGUI classes.
Database is used to store the history of values for each data point.
TelemetryGUI configures the main window and creates an instance of the ConfigurationLoader to read the configuration text file and make the corresponding panels. A BallPanel is used to visualize the robot's pitch and yaw angles. A SerialConfigPanel shows the available serial ports and baud rates, and allows the user to establish a connection with the selected port.
SerialPortListener is used to spawn a new thread that monitors the RS232 link, interprets incoming text, and populates the database with new values.
LineGraph is a window that shows the recent history of an item in the form of a constantly updating line graph.
Here's a video clip of me testing an early version of this program with my robot back in December 2013: